Wednesday, April 20, 2011


Iron Man Light Laser it`s become really

If you have seen the Iron Man movie the image above is sure to be familiar to you.
Patrick from Germany shared this project with us in the Hacked Gadgets forum, we have seen other cool Iron Man Repulsor Light projects before but as far as I know this is the first that it truly very dangerous.
So a word of warning, do not attempt to copy this build unless you know what you are doing! Patrick already has plans for version 2 in his head, I look forward to seeing that in the future.
The goal was to create a hand-held laser…powerful…balloons pop across the room…cuts plastic…
Made SOME laser-guns before, and the most “useless” space-eating part, was the grip.
Made SOME laser-guns before, and the most “useless” space-eating part, was the grip.
So I had to get rid of it. I am am a HUGE fan of the new Iron Man movies, so I decided to try my own design and make a glove. Took a whole weekend to make it, and another 2 days for the paint-job {made EVERYTHING myself…from metal-work, wiring, paint-job}
Technical info:
# made of 2mm brass-sheet
#constant current LM317 driver
# 445nm 1000mW laser diode
# 2x 3.7V Li Ion cells (=7.4V total)
#constant current LM317 driver
# 445nm 1000mW laser diode
# 2x 3.7V Li Ion cells (=7.4V total)
Ant navigation Robot

Tuesday, April 19, 2011
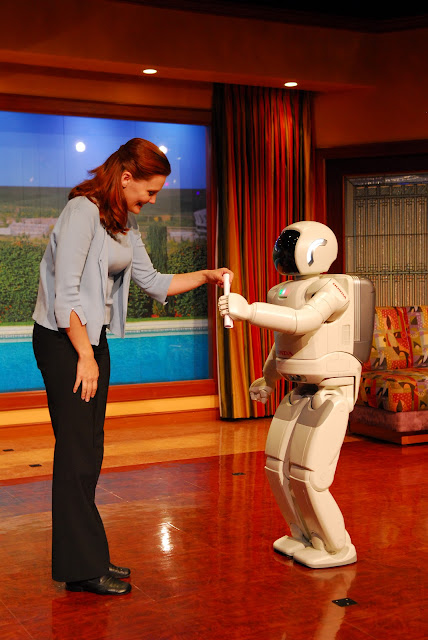
ASMIO Robot
Monday, April 18, 2011
Robots can Full of Love

However they are assisting the elderly, or simply popping human skulls like ripe fruit, robots aren't usually known for their light touch. And while this may be fine as long as they stay relegated to cleaning floors and assembling cars, as robots perform more tasks that put them in contact with human flesh, be it surgery or helping the blind, their touch sensitivity becomes increasingly important.
Thankfully, researchers at the University of Ghent, Belgium, have solved the problem of delicate robot touch.
Unlike the mechanical sensors currently used to regulate robotic touching, the Belgian researchers used optical sensors to measure the feedback. Under the robot skin, they created a web of optical beams. Even the faintest break in those beams registers in the robot's computer brain, making the skin far more sensitive than mechanical sensors, which are prone to interfering with each other.
Robots like the da Vinci surgery station already register feedback from touch, but a coating of this optical sensor-laden skin could vastly enhance the sensitivity of the machine. Additionally, a range of Japanese robots designed to help the elderly could gain a lighter touch with their sensitive charges if equipped with the skin.
Really, any interaction between human flesh and robot surfaces could benefit from the more lifelike touch provided by this sensor array. And to answer the question you're all thinking but won't say: yes. But please, get your mind out of the gutter. This is a family site.
Via New Scientist
